





How advances in design and manufacturing are enabling a new paradigm for digit amputation care.
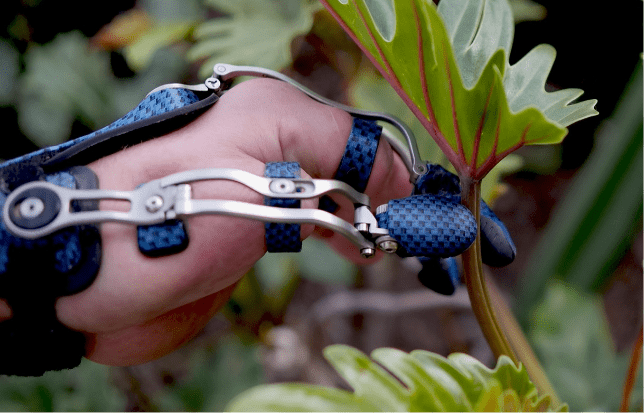
Naked Prosthetics’ devices are body-driven mechanisms driven off of intact joints. In order to provide effective grasp forces, consideration must be paid to each joint’s capacity to generate torque. As with any anatomical joint, there are angular ranges throughout flexion/extension in which each joint experiences its maximum moment-generating capability. The factors influencing this peak force range include pretention on the tendons, muscle body engagement and, for the hand, the posture of the surrounding anatomy.
The combination of the hand joints with four-bar linkages provides a powerful opportunity for engineering optimization. A four-bar has an interesting property: its velocity profile changes throughout its trajectory. Sometimes its “throw” is very fast, and sometimes it is very slow. Given that speed and force are inversely related in force systems, it becomes imperative to consider peak joint moment generation ranges, four-bar kinematics, and functional hand grasps in order to create a powerful finger prosthesis.
Our devices mimic the kinematic coupling seen in the stable motion of anatomic fingers. Building on this and giving consideration to efficient load bearing postures, we provide tools that both mimic biology and behave quite differently, with the overall goal being to create a useful end effector capable of dexterity and strength. Our devices are often used for 12-16 hours per day on hard-labor jobs.
Naked Prosthetics’ goal is to change the harsh reality facing individuals after these all too common injuries and ensure that no one loses his or her vocation as a result. Our team works daily to innovate in a space where much innovation is needed and where technology has not yet lived up to its promise. We deliver solutions that can handle the load.
Please do not submit any personal medical information.
Information is secure: https://www.npdevices.com/privacy-policy/
Jaime Perkins injured four of his fingers while working with a jointer in his workshop in 2020. A well-respected builder, he joins Naked Prosthetics with his own audience of over 606,000 YouTube channel subscribers for Perkins Builder Brothers, a company started by his architect father, that he shares with his brother, Erik. Jaime joined as a NPChampion Ambassador after experiencing for himself the functionality afforded by the MCPDrivers. Jaime lives in North Carolina with his wife Jaime and their three children.
At age 36, Matt lost several digits due to vascular occlusion. After a several-year struggle that led him down a dark and troubled path, Matt found his way to Naked Prosthetics to become the first to wear each of the three custom, body-driven devices together: one PIPDriverTM, one MCPDriverTM, and one ThumbDriverTM. Because of his directness and candor, Matt has become a popular addition to conferences and speaking engagements that Naked Prosthetics participates in. Matt now owns his own successful concrete finishing business, something he says wouldn’t have been possible without the technology behind his devices.
Moises spends his time traveling between California and Mexico. In the Summer of 2012, Moises and his friend took their truck out after a tropical storm in Mexico to assess the local damage. While towing a vehicle stuck in the flood, they decided to try something new – boogie boarding on the flooded streets. An accident with the rope caused four of his fingers on his right hand to be torn off. Moises wears a four-digit GripLock finger with socketing from the Ossur team.
GLF Designed + Manufactured by Naked Prosthetics. Socket Fabrication by Hanger Clinic and Össur.
Natasha lost two of her fingers to a woodworking accident at home in 2019. A beef and poultry farmer, artist, and mother to five girls, Natasha wears two of our MCPDrivers and was a beta tester for our Conductive Tip and Rose Gold finish. Since her accident, she has devoted much of her time and energy to the amputee community, sharing her journey and helping other amputees find acceptance and purpose from within. For those reasons and more, Natasha is a welcome addition to the NPChampion Ambassador family and a warm and engaging advocate for the amputee community.
As a beta tester for Naked Prosthetics, Nick Armstrong was instrumental in the development of the MCPDriver. At the time Nick suffered a workplace injury in 2012 that left him with amputations on five of his fingers, prosthetic options that would allow him to get back to work as a welder and auto mechanic and back to taking care of his farm didn’t exist. In 2015 Naked Prosthetics began testing the MCPDriver, and Nick provided the necessary real-life testing and feedback to assure the devices’ performance in harsh environments. Nick lives in Illinois and speaks alongside NP regularly to groups about his story and the functionality and confidence his devices provide.
Born and raised in Louisiana, Trevor is a calm soul with a southern charm that draws you in. Trevor’s left hand was injured on the job in late 2020, repairing a machine that feeds, cuts, and seals velcro. While fixing the machine the operator started up the machine and the blade took his middle and ring finger, cutting the tendon on his index finger, and crushing his pinkie. As our newest NPChampion Ambassador, he wears two MCPDrivers and is motivated by the thought of helping someone like himself no longer be afraid of life.
A mother to two young children, it is important for her to not miss a thing. Outdoor enthusiast and whim taker, Ashley, was trying something new, riding a motorcycle. In the Summer of 2021 she joined her husband on the road when she lost control of the bike. In an attempt to save her leg from being crushed, she threw her hand to rest on the band which sucked her fingers into the sprocket and amputated her middle finger. Her device has given her more than function, it has given her hope. With the help of her MCPDriver, she wants to spread hope to everyone in this community.
Father of four, Marine Corps Veteran, and woodworker, Ken, lost his left thumb, index finger, ring and pinkie finger in a table saw accident mid 2021. Ken’s three-digit MCPDriver and ThumbDriver has allowed him to turn his woodworking skills from a hobby into a full business. His unabashed willingness to share his story through humor and charm are a welcome addition to the NPChampions program.
Michael brings energy and positivity to every conversation he has and is sure to leave you with a smile. A splinter was all it took. Early 2019 Michael was working when a small piece of wood lodged itself into his hand. Unfortunately, after removing it the wound became infected and required his right thumb to be amputated. With the help of his ThumbDriver, Michael hasn’t let this slow him down!
Stephanie lives in Alberta, Canada with her husband and is passionate about inspiring other amputees to know that losing fingers isn’t the end and that they can overcome challenges that they may face. Self proclaimed “accident prone” sawmill worker and physical trainer, Stephanie, wasn’t surprised when she crushed her fingers. In November, 2019 she went to grease a machine when she noticed it was still on. Before she could pull away it had grabbed onto her hand, removing her left thumb and pointer finger. Stephanie wears one MCPDriver and a ThumbDriver. She wants to help inspire other amputees to know that losing fingers is not the end and that they too can overcome challenges.
Tammy is a court reporter in South Dakota and wears one MCPDriver.
College student and competitive swimmer Alycia lost a majority of her pinkie finger in an accident at only 15 years old. With the use of her PIPDriver, she’s rediscovered her confidence and uses her platforms to share her story and inspire others.
Nelisiwe wears two MCPDrivers. An adventurous and captivating woman, she travels the world sharing snaps along the way.
Darrel joins us from Alberta, Canada after losing much of his index finger in a workplace accident late in 2017. He was checking a fit up for one of his crew members when an improperly tacked steel beam dropped on his finger. A jack of many trades, Darrel is not only a construction site foreman but also a gifted photographer. He wears an MCPDriver. As some of his biggest fans, Naked Prosthetics looks forward to highlighting his work and his story.
